









 Peloton will join forces with Cummins, Peterbilt and ZF TRW to develop a connected powertrain to increase fuel efficiency through platooning.
Peloton will join forces with Cummins, Peterbilt and ZF TRW to develop a connected powertrain to increase fuel efficiency through platooning.Automated vehicle company Peloton Technology will participate in a Department of Energy-sponsored program to further develop its truck platooning technology, with the goal of pushing the envelope on fuel economy.
The project, called the Next-Generation Energy Technologies for Connected and Autonomous On-Road Vehicles program (or NEXTCAR), is led by Purdue University.
Peloton will be working with Cummins, Peterbilt, ZF TRW, the University of Arizona and the National Renewable Energy Laboratory (NREL) on a project team. Peloton will contribute its current platooning system and higher-automation platooning technology under development. Cummins will offer powertrain technology. ZF TRW will supply steering controls, and Peterbilt will supply the trucks.
“As we join in launching this national project, we are excited about the team’s complementary strengths in commercial powertrain development, connected vehicle applications, vehicle automation and trucking operations,” said Peloton CEO Josh Switkes. “Our first truck platooning system is coming to market in 2017. This project will build upon our existing system and is complementary to the higher-automation solutions we are developing next.”
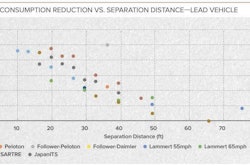
The goal of the group is to develop powertrain tech and automated driving controls to improve fuel efficiency in tractor trailers by 20 percent in real-world driving conditions.
The integration of these technologies will raise the system from a Level 1 to a Level 2 autonomous driving system.
“Our objective is to tap into fuel savings that can only be attained by managing the powertrain precisely for the road ahead, and for the specific configuration of the trucks,” said Michael Palmer, Peloton’s director of research. “Cloud connectivity provides information about the road ahead, and the trucks exchange data about their estimated mass and powertrain capabilities. This helps us maintain smooth, efficient platooning through grades and rolling hills.”
Another area of focus will be to improve connectivity including over-the-air engine recalibrations and computing between trucks and the cloud.


The three-year project is expected to launch in March 2017, according to Peloton. The team will receive $5 million in funding from the Department of Energy’s Advanced Research Projects Agency-Energy (ARPA-E).
A video demonstrating Peloton’s platooning system can be seen below.